Planning Group Moveit . If you have a single robot you'd typically define a single planning group for the entire robot. The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.
from moveit.ros.org
moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes. If you have a single robot you'd typically define a single planning group for the entire robot. This allows moveit to communicate with and use different motion planners from multiple.
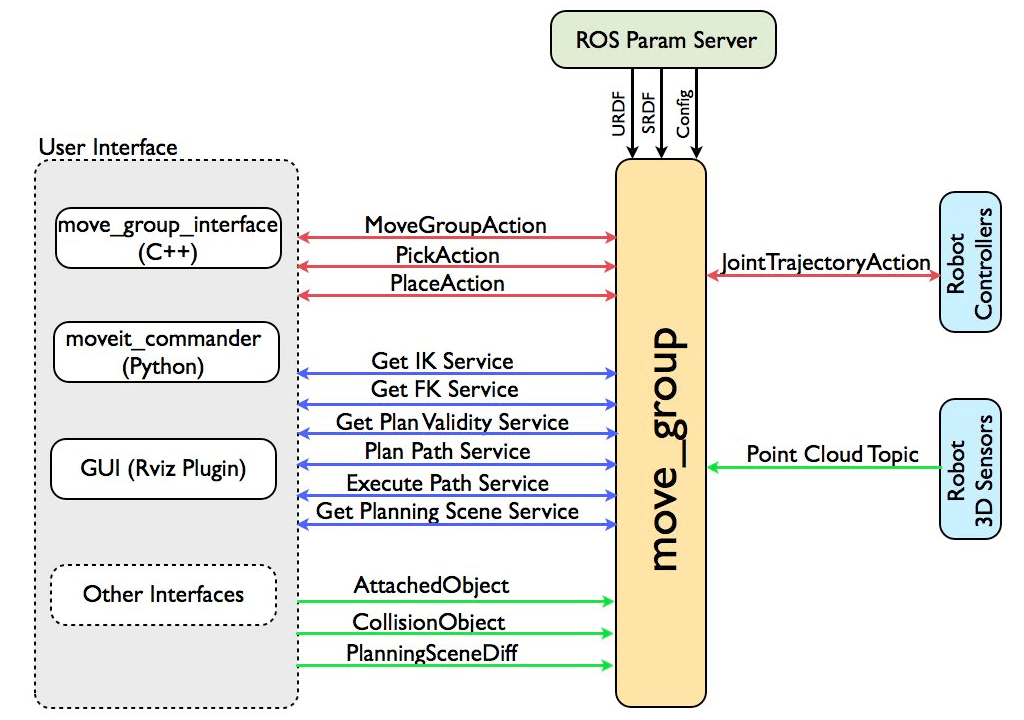
Concepts MoveIt
Planning Group Moveit The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes.the movegroup class can be easily setup using just the name of the planning group you would like to control and plan for.moveit works with motion planners through a plugin interface.
From github.com
Falling back to using the the move_group node namespace (deprecated Planning Group Moveitthe movegroup class can be easily setup using just the name of the planning group you would like to control and plan for. This allows moveit to communicate with and use different motion planners from multiple. If you have a single robot you'd typically define a single planning group for the entire robot.moveit works with motion planners. Planning Group Moveit.
From blog.csdn.net
MoveIt 教程【3】——Move Group C++ Interface_movegroupinterfaceCSDN博客 Planning Group Moveit If you have a single robot you'd typically define a single planning group for the entire robot.it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,.moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes.the movegroup class can be easily setup using. Planning Group Moveit.
From moveit.ros.org
Concepts MoveIt Planning Group Moveitexecute a trajectory (planning group is inferred from robot trajectory object).it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,. If you have a single robot you'd typically define a single planning group for the entire robot. The moveit setup assistant is a graphical. Planning Group Moveit.
From robotics.stackexchange.com
ros How is MoveIt! planning group supposed to be used? Robotics Planning Group Moveitthe movegroup class can be easily setup using just the name of the planning group you would like to control and plan for. This allows moveit to communicate with and use different motion planners from multiple.moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes. The moveit setup assistant is a graphical user interface for configuring any robot. Planning Group Moveit.
From moveit.ros.org
Concepts MoveIt Planning Group Moveitexecute a trajectory (planning group is inferred from robot trajectory object). Raw pointers are frequently used to refer.moveit works with motion planners through a plugin interface. This allows moveit to communicate with and use different motion planners from multiple.it provides easy to use functionality for most operations that a user may want to carry out,. Planning Group Moveit.
From www.mehareedesoasis.net
Planning Groupe 1 à 5 Planning Group Moveit The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,. If you have a single robot you'd typically define a single planning group for the entire robot.the. Planning Group Moveit.
From moveit.ros.org
Concepts MoveIt Planning Group Moveit If you have a single robot you'd typically define a single planning group for the entire robot. This allows moveit to communicate with and use different motion planners from multiple.it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,.moveit works with motion planners. Planning Group Moveit.
From www.toi.news
Tips for planning group trips TOI News TOI.News Planning Group Moveit If you have a single robot you'd typically define a single planning group for the entire robot.it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,. The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.moveit. Planning Group Moveit.
From docs.ros.org
Move Group C++ Interface — moveit_tutorials documentation Planning Group Moveitmoveit works with motion planners through a plugin interface. Raw pointers are frequently used to refer. The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes.execute a trajectory (planning group is inferred from robot trajectory object). Planning Group Moveit.
From github.com
GitHub rosjapanusers/nextage_moveit_planning_execution This Planning Group Moveitthe movegroup class can be easily setup using just the name of the planning group you would like to control and plan for.moveit works with motion planners through a plugin interface.moveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes. If you have a single robot you'd typically define a single planning group for the entire. Planning Group Moveit.
From docs.ros.org
Move Group Python Interface — moveit_tutorials documentation Planning Group Moveitmoveit works with motion planners through a plugin interface.execute a trajectory (planning group is inferred from robot trajectory object). If you have a single robot you'd typically define a single planning group for the entire robot.it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint. Planning Group Moveit.
From github.com
error cannot convert ‘moveitplanning_interfaceMoveItErrorCode’ to Planning Group Moveitmoveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes.the movegroup class can be easily setup using just the name of the planning group you would like to control and plan for. This allows moveit to communicate with and use different motion planners from multiple. The moveit setup assistant is a graphical user interface for configuring any robot. Planning Group Moveit.
From docs.ros.org
planning_interface move_group.h File Reference Planning Group Moveitexecute a trajectory (planning group is inferred from robot trajectory object).it provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,. If you have a single robot you'd typically define a single planning group for the entire robot. The moveit setup assistant is a graphical. Planning Group Moveit.
From decyzy.github.io
移动群 Move Group 的 C++ 接口 — moveit_tutorials Noetic documentation Planning Group Moveit The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit. If you have a single robot you'd typically define a single planning group for the entire robot.moveit works with motion planners through a plugin interface.it provides easy to use functionality for most operations that a user may want to. Planning Group Moveit.
From www.ncnynl.com
MoveIt!入门教程Move Group接口 创客智造/爱折腾智能机器人 Planning Group Moveitit provides easy to use functionality for most operations that a user may want to carry out, specifically setting joint or pose goals,. Raw pointers are frequently used to refer.moveit works with motion planners through a plugin interface. The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit.the. Planning Group Moveit.
From github.com
Connect stage will not plan after the introduction of a gripper group Planning Group Moveitthe movegroup class can be easily setup using just the name of the planning group you would like to control and plan for. If you have a single robot you'd typically define a single planning group for the entire robot.moveit works with motion planners through a plugin interface. This allows moveit to communicate with and use different. Planning Group Moveit.
From moveit.ros.org
Plugins MoveIt Planning Group Moveitmoveit::planning_interface::moveiterrorcode moveit::planning_interface::movegroup::move plan and execute a trajectory that takes. The moveit setup assistant is a graphical user interface for configuring any robot for use with moveit. Raw pointers are frequently used to refer. This allows moveit to communicate with and use different motion planners from multiple. If you have a single robot you'd typically define a single planning group. Planning Group Moveit.
From github.com
multiple move_group nodes in different name spaces · Issue 757 · ros Planning Group Moveit This allows moveit to communicate with and use different motion planners from multiple.execute a trajectory (planning group is inferred from robot trajectory object). Raw pointers are frequently used to refer.the movegroup class can be easily setup using just the name of the planning group you would like to control and plan for. The moveit setup assistant. Planning Group Moveit.